کنترل دور موتور: راهنمای جامع انتخاب و خرید درایو کنترل دور موتور AC و DC

یو پی اس چیست؟ 2 روش مهم استفاده ی یو پی اس آسانسور
آگوست 16, 2022
محاسبه بازده چاه آسانسور
جولای 9, 2023
کنترل دور موتور به چه معناست؟
کنترل دور الکتروموتور که در قالب کلماتی چون درایو نمودن موتور ،راه اندازی نرم موتور ،تنظیم سرعت موتور می آید در کارخانجات و مصارف صنعتی و هر جایی که الکتروموتور سه فاز وجود دارد معنادار میشود.
چرا که راه اندازی موتورهای سه فاز همواره جزو مواردی هستند که صنایع را به خود درگیر کرده اند کنترل دور الکتروموتور یا همان اینورتر ها به لحاظ تنوعی که دارند و نیز تنظیمات متفاوتی که دارند ، به راحتی توانسته اند این معضل را حل کنند.
کنترل دور در انواع DCوAC وجود دارد اما بدلیل محدودیتهای موتورهای DC نظیر قیمت ، اندازه و مشکلات نگهداری امروزه از موتورهای القایی AC که از سادگی ، قیمت پایین و قابلیت مناسب برخوردار هستند استفاده می شود لذا کنترل دور AC علیرغم پیچیده تر بودن بتدریج جایگزین نوع DC خود شده است.کنترل دور موتور AC به نام اینورتر و درایو AC نیز شناخته می شود.
انتخاب اینورتر برای کنترل دور الکتروموتور کار سختی نیست. تنها کافیست که نوع مصرف و توان مصرفی را بدانید ،سبک سنگین نیمه سنگین و اینکه برق تغذیه تکفاز یا سه فاز باشد. تمامی اینورترها دارای تنظیمات پیش فرض هستند و نیز دستورالعمل کنترل دور موتور که بسته به نیاز ،پارامتر مورد نظر تنظیم گردد.
الکترو موتور چیست؟ الکتروموتور یا موتور الکتریکی (Electric Motor)
نوعی ماشین است که انرژی الکتریکی را به حرکت مکانیکی تبدیل می کند. ایده کلی بر این اساس است که وقتی که یک هادی حامل جریان الکتریسیته تحت اثر یک میدان مغناطیسی قرار می گیرد نیرویی بر روی آن هادی حامل جریان از سوی میدان مغناطیسی اعمال می شود. اغلب موتورهای الکتریکی دوار هستند. اما موتور خطی هم وجود دارند.
فرق موتور الکتریکی AC با DC چیست؟
- موتور های AC همان گونه که از نامشان پیدا است به جریان متناوب (Alternative current) برای تولید میدان الکترومغناطیسی احتیاج دارند در حالی که موتور های DC از جریان مستقیم برای این منظور استفاده می کنند.
- تفاوت دیگر این است که فرکانس تغذیه موتور DC صفر است در حالی که موتور AC با فرکانس 50 هرتز تغذیه می شود.
- موتور های DC معمولاً در جایی استفاده می شوند که سرعت موتور نیاز به کنترل بیرونی دارد. این در حالی است که موتورهای AC در برنامه هایی که عملکرد انرژی را در مدت زمانی طولانی جستجو و بررسی می کنند مورد استفاده قرار می گیرند.
- نکته دیگر این است که همه موتورهای الکتریکی DC تک فاز هستند اما موتورهای AC می توانند تک فاز یا سه فاز باشند.
- هر دو موتور AC و DC از اصل استفاده از سیم پیچ آرماتور و میدان مغناطیسی استفاده می کنند با این تفاوت که در موتور های DC آرماتور می چرخد ولی میدان مغناطیسی نمی چرخد. این نکته در موتورهای AC برعکس است یعنی آرماتور نمی چرخد اما میدان مغناطیسی دائماً در چرخش است.
- در مواقعی که درباره تعمیر و نگهداری از موتور الکتریکی نگرانی وجود دارد از موتورهای AC استفاده می شود زیرا همان طور که قبلاً گفته شد موتورهای DC به مراقبت و تعمیر بیشتری احتیاج دارند.
- در کارهایی که به سرعت ثابت با راه اندازی بار های سنگین احتیاج داریم موتورهای AC بهتر از موتورهای DC هستند.
- موتورهای AC دارای یک کنترل کننده هستند و استفاده و نگهداری از آن ها ارزان تر و مقرون به صرفه تر است در حالی که موتور های DC از اجزای متحرک زیادی تشکیل شده اند که جایگزین کردن آن ها هزینه زیادی دارد.
- میدان های چرخشی موتورهای AC و DC با همدیگر تفاوت دارد. در موتور های AC میدان مغناطیسی به دلیل چرخیدن جریان های متناوب و متقارنی که پشت سر هم قرار دارند دائماً می چرخد. این چرخش میدان مغناطیسی به علت سرعت تغییر AC است. این در حالی است که در موتورهای DC چرخش میدان مغناطیسی با تغییر کردن ولتاژ ثابت و مکان واقعی کویل متصل شده امکان پذیر است.
- روش کنترل سرعت موتورهای DC و AC نیز متفاوت است. سرعت موتورهای AC می تواند تا زمانی که سرعت جریان متناوب تغییر می کند تغییر کند اما در موتور های DC سرعت فقط زمانی تغییر می کند که سرعت روتور تغییر کند. در این موتورها سرعت روتور متناسب با ولتاژ است، پس با تغییر ولتاژ می توان سرعت موتور را تغییر داد.
- نحوه تولید گشتاور در موتور های AC و DC متفاوت است. در موتورهای القایی AC میدان چرخشی استاتور و میدان مغناطیسی چرخشی روتور برای تولید گشتاور با همدیگر تعامل دارند و سرعت های روتور و میدان مغناطیسی با یکدیگر همگام است. در موتور های DC هم میدان مغناطیسی روتور و میدان مغناطیسی استاتور برای تولید گشتاور با همدیگر تعامل دارند اما در حین چرخش میدان مغناطیسی آرماتور ثابت است.
- با توجه به تفاوت هایی که درباره آن ها توضیح داده شد می توان نتیجه گرفت که محرک های موتور های AC و DC، همچنین عملکرد و کاربرد های آنان با همدیگر کاملاً متفاوت است.
روش های کنترل دور موتور AC
اینورتر یا درایو AC
در گذشته همواره برای بارهایی که نیاز به کنترل سرعت دقیقی داشتند از موتورهای جریان مستقیم یا DC استفاده میشد. اما به دلیل میزان استهلاک بالای جاروبکها و سایر اجزای این نوع موتورها، مسئله استفاده از موتورهای القایی و کنترل سرعت آنها کم کم معروف شد.
اولین درایو یا اینورتر، در سال ۱۹۵۸ توسط یک شرکت آمریکایی تولید شد. به تدریج امکانات و قابلیتهای بیشتر و بهتری توسط شرکتهای متعدد دیگری به اینورترها اضافه شد و اینورترهایی با قابلیتهای بیشتری وارد بازار شدند.امروزه ۱۰ درصد از کل موتورهایی که در سراسر جهان مورد استفاده هستند مجهز به اینورتر میباشند.
وظیفه اینورتر الکتروموتور چیست؟
همانطور که گفتیم اینورتر عمل کنترل سرعت یا دور الکتروموتور را انجام میدهد. این تجهیز قادر است دور الکتروموتور را از صفر تا چندین برابر دور نامیموتور و بطور پیوسته تغییر دهد. با کنترل سرعت الکتروموتورها، پروسههای صنعتی منعطف تر میشوند و در بسیاری از کاربردها صرفه جویی انرژی نیز رخ میدهد. علاوه بر آن، با استفاده از اینورترها، جریان راه اندازی دریافتی از شبکه، به میزان زیادی کاهش پیدا میکند. بطوریکه این جریان خیلی کمتر از جریان نامیالکتروموتور است.
اینورترها همچنین میتوانند الکتروموتور را بطور نرم و کاملاً کنترل شده استارت و استپ نمایند. زمان استارت و استپ را میتوان به دقت تنظیم نمود. این زمانها میتوانند کسری از ثانیه و یا صدها دقیقه باشد. توانایی اینورتر در استارت و استپ نرم موجب کاهش قابل ملاحظه تنشهای مکانیکی در کوپلینگها و سایر ادوات دوار میگردد.
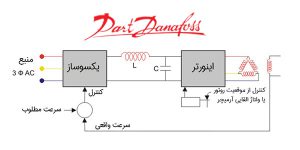
اینورتر یا درایو چگونه سرعت یک موتور را کنترل میکند؟
اینورتر بین منبع تغذیه و موتورهای القایی قرار میگیرد. برق با ولتاژ Ac که ولتاژ و فرکانس ثابتی دارد، وارد اینورتر میشود. ولتاژ ورودی توسط این تجهیز به ولتاژ DC تبدیل میشود که دارای ریپلهایی میباشد. در ادامه توسط یک مدار میانی، این ریپلها حذف شده و ما دارای یک ولتاژ DC ثابت خواهیم بود.
در نهایت، اینورتر این ولتاژ DC را تبدیل به یک ولتاژ AC با ولتاژ و فرکانس متغیر خواهد کرد که ما به عنوان کاربر یا اپراتور میتوانیم براساس کاتالوگ و تنطیمات هر اینورتر، فرکانس و ولتاژ خروجی و تحویلی به موتور را تنظیم کرده و از این طریق، کنترل دور و یا گشتاور الکتروموتور را در اختیار بگیریم.
فرآیند تغییر سرعت در اینورترها با تغییر چه پارامتری امکان پذیر است؟
با تغییر میزان فرکانس تحویلی به موتور از طریق کنترل سوئیچهای ترانزیستورهای اینورتر، میتوان میزان سرعت دورانی شفت الکتروموتور را کنترل کرد. اگر فرکانس بیشتری به موتور اعمال شود، شاهد افزایش دور و در صورتی که فرکانس کمتری به موتور اعمال شود شاهد کاهش دور در الکتروموتور خواهیم بود.
روشهای کنترل دور موتور در اینورترها
همانطور که میدانید، انواع مختلفی از ماشین آلات در صنعت موجود هستند. روشهای استاندارد کنترلی در اینورترهای AC، برای کنترل این ماشین آلات، دو روش اسکالر و برداری (وکتور) هستند. در ادامه به بررسی این روشها میپردازیم.
روش کنترل اسکالر یا V/F در اینورتر
این روش را در صنعت با اسمهایی مانند مدولاسیون عرض پالس (PWM)، کنترل فرکانس V/F یا VVVF نیز میشناسند.
در این روش، ابتدا ولتاژ AC به ولتاژ DC تبدیل شده سپس بوسیله مدولاتور، دنباله پالسی از ولتاژ با فرکانس متغیر به موتور ارسال میشود.
در روش کنترل اسکالر مقدار V/F ثابت است، بنابراین با افزایش فرکانس ولتاژ افزایش مییابد و در نهایت، در این حالت کنترلی روی گشتاور موتور وجود ندارد و تغییرهای کنترلی ولتاژ و فرکانس هستند که بطور غیر مستقیم موتور را کنترل میکنند.
به علت عدم استفاده از فیدیک، کنترلی روی موقعیت یا سرعت شافت موتور وجود ندارد. همچنین استفاده از مدولاتور باعث ایجاد تاخیر در پاسخ به گشتاور به سرعت میشود.
پس به طور کلی، این روش برای ثابت نگه داشتن نسبت ولتاژ و فرکانس خروجی درایو است.
به عنوان مثال، یک درایو ۲۰۰ ولت AC، در فرکانش ۶۰ هرتز، ولتاژ خروجی ۲۰۰ ولت و در فرکانس ۳۰ هرتز، ولتاژ خروجی ۱۰۰ ولت را دارند. از آنجایی که رابطه مستقیمی بین ولتاژ و فرکانس داریم، از این درایوها میتوانیم برای کنترل همزمان چند الکتروموتور استفاده کنیم.
این روش به دلیل عملکرد و پاسخ کند بودن تریستورها میزان دقت را در کنترل سرعت پایین میآورد و خطا را بالا میبرد.
روش کنترل برداری یا وکتور در اینورتر
این روش، نسبت به روش قبل جدیدتر است و به دلیل معایبی که در روش V/F وجود دارد، این روش، جایگزین روش قبلی شد.
در روش اسکالر، متغیرهای کنترلی غیرحقیقی هستند. در صورتی که در این روش تلاش شده که متغیرهای حقیقی الکتروموتور مانند شار و گشتاور کنترل شوند.
برای کنترل بردار شار و گشتاور الکتروموتور، جریان آن باید قابل کنترل باشد. اما در این الکتروموتورها کنترل سیستمی روی جریان آنها وجود ندارد. از طرفی جریان الکتروموتور تابعی ازجریان استاتور است و بنابراین با استفاده از محاسبات ریاضی پیچیده با توجه به وجود این رابطه بین جریان الکتروموتور و جریان استاتور، شار آن قابل کنترل هستند. در ضمن با استفاده از فیدیک میتوان موقعیت و سرعت الکتروموتور را کنترل کرد. با وجود دقت در سرعت و پاسخ سریع به تغییرات گشتاور، احتیاج به فیدبک و مدولاتور از معایب این درایوها است.
در این روش ترانزیستورهای پاسخ سریع جایگزین تریستورهای کند پاسخ شدند و همین امر باعث شد تا در روش وکتور شاهد دقت بالا در کنترل سرعت الکتروموتورها باشیم و میزان خطا به صفر برسد.
روشهای کنترلی V/F و وکتور چه تفاوتی با یکدیگر دارند؟
- به دلیل ابعاد کوچک تر ترانزیستورها در درایوهایی با روش وکتور کنترل شاهد ابعاد کوچکتری نسبت به درایوهای V/F کنترل هستیم.
- در روش V/F میتوان به صورت همزمان از درایو برای کنترل چندین الکتروموتور استفاده کرد. این قابلیت در درایوهای وکتور کنترل وجود ندارد و این نوع درایوها فقط امکان پشتیبانی از یک موتور را دارند.
- در روش وکتور شاهد ارتباط دوطرفه بین الکتروموتور و اینورتر هستیم. به شکلی که اینورتر، شرایط الکتروموتور را بررسی و براساس بازخوردی که هر لحظه از الکتروموتور میگیرد تصمیم میگیرد که فرکانس را به چه میزان افزایش یا کاهش دهد تا سرعت موتور به میزان تنظیم شده توسط کاربر برسد. اما در روش V/F ارتباط الکتروموتور و اینورتر، یک طرفه میباشد.
- روش وکتور دقت بالاتر و خطای کمتری داشته و براساس بازخوردی که از الکتروموتور میگیرد، بهترین تغییرات را برای کنترل سرعت اعمال خواهد کرد، اما این امکان در روش V/F وجود ندارد.
انتخاب نوع کنترل اینورتر یا درایو بر چه اساسی انجام میشود؟
انتخاب نوع کنترل اینورتر باید براساس گشتاور در سرعت پایین، بازه کنترل سرعت و دقت باشد پس:
– روش V/F در مواردی که گشتاور راه اندازی پایین و تغییرات کم بار وجود داشته باشد، استفاده میشود.
مانند: پمپها و فنها
-روش وکتور در مواردی که گشتاور راه اندازی بالا و تغییرات زیاد بار را شاهدیم کاربرد دارد.
مانند:جرثقیلها
اینورتر یا درایو چه مزایایی در صنعت دارد؟
- کنترل سرعت و گشتاور در بهینه ترین حالت ممکن.
- کاهش مصرف انرژی
- راه اندازی و توقف الکتروموتورها به صورت نرم
- تغییر جهت گردش به سانی
- کاهش نیاز به سیستمهای حفاظتی جانبی
طبقه بندی اینورترها بر مبنای چه پارامترهایی انجام میشود؟
طبقه بندی اینورتر یا درایوها بر اساس کلاس ولتاژی و توان منبع تغذیه انجام میشود.
اینورترها معمولاً در کلاسهای ولتاژی تک و سه فاز و رنجهای ۲۰۰، ،۴۰۰ و ۶۹۰ ولتی در بازار رایج اند. این تجهیز از نظر توان منبع هم از ۱٫۵ کیلووات به بالا عرضه میشود.
البته ناگفته نماند که کلاسهای تولیدی هر برند متفاوت بوده و براساس کاتالوگها قابل بررسی میباشد.
اینورترها در زندگی روزمره ما کجا قرار گرفته اند؟
در سالهای گذشته نیاز به کنترل میزان سرعت الکتروموتورها به صورت چشمگیری در صنایع مختلف افزایش یافته است. این امر باعث شده اینورترها بیشتر در زندگی روزمره ما نقش ایفا کنند. به طور مثال در دستگاههای عکس برداری بیمارستانها، آسانسورها، پله برقیها، نوار نقالههای خط تولید شرکتها، سیستمهای ریسندگی، صنعت کاغذ و چرم سازی و بسیاری از دیگر صنایع.
کنترل دور موتور DC
موتورهای DC دارای قابلیت انعطاف بسیار بوده و در صنایع کاربرد وسیعی دارند. با اتصالات مختلف سیم پیچ میدان می توان در این ماشین ها به مشخصه های گوناگون گشتاور، سرعت و ولتاژ جریان دست یافت. موتورهای DC به دلیل امکان سرعت بالای خود کاربرد وسیعی در صنایع دارند. امروزه هنوز موتورهای DC در سیستم های حمل و نقل (مترو) حرف اول را می زنند. موتورهای DC کوچک در سیستم های کنترل به وفور یافت می شوند که یکی از آن ها کنترل دور موتور DC است.
از عمده کاربردهای کنترل کننده دور و گشتاور موتور الکتریکی، انتقال انرژی از منبع آن به فرایند تحت کنترل است. درایوهای DC، سیستم های کنترل سرعت برای موتورهای DC هستند. در موتورهای DC، سرعت موتور با ولتاژ محرک رابطۀ مستقیم و با شار موتور (که یک تابع جریان میدان است) رابطۀ معکوس دارد. اما می توان از هر دو ولتاژ یا جریان میدان برای کنترل سرعت استفاده کرد.

عوامل موثر در سرعت موتور DC
سرعت موتور DC بستگی به یک سری موارد دارد که عبارتند از:
- ولتاژ و جریان عبوری از سیم پیچ موتور
- بار موتور
- گشتاور موتور
روش های کنترل دور موتور DC
1. کنترل دور موتور DC با درایو
کنترل دور موتور DC از طریق درایو مخصوص موتور DC صورت می گیرد. از عوامل مؤثر در انتخاب درایو DC مناسب، رنج ولتاژ درایو DC، جریان نامی و لحظه ای است.
درایور موتور DC
با درایور موتور DC می توان کنترل دور موتور DC را انجام داد. با استفاده از درایور موتور DC کنترل دور موتور را می توان از حداقل 50 درصد دور نامی تا حداکثر مقدار دور نامی انجام داد.
از آنجا که یک تراشه استاندارد تنها قادر به تولید مقدار کمی جریان است، شما قادر نیستید موتورهای کوچک را با اطمینان به طور مستقیم راهبری کنید، چه رسد به موتورهای بزرگتر. بنابراین شما به راهی برای راهبری آن ها نیاز دارید. این جایی است که دایور موتور DC به کمک شما می آید. درایور موتور DC از یک تراشه بزرگتر استفاده می کند که قادر است مقادیر بیشتری از ولتاژهای جریان و بالاتر را نسبت به نوع استاندارد از پین میکروکنترلر کنترل کند. درایور شما را قادر میسازد با یک سیگنال کوچک، بار بسیار بزرگتری را کنترل کنید.
درایور dc در واقع نوعی تقویت کننده یا تعدیل کننده نیرو است که بین کنترلر و موتور dc قرار می گیرد. این وسیله، جریان ضعیف را دریافت کرده و با تبدیل آن به جریان قوی به موتور کمک می کند. به همین دلیل است که از اصطلاح راه انداز dc نیز برای این وسیله استفاده می شود.
درایور موتور DC چگونه کار میکند؟
یکی از روش های رایج و پرکاربرد برای درایور کردن متور dc براش که عملکرد آن نیز کاملا ساده است به این صورت است که با استفاده از دو جفت ترانزیستور جهت جریانی که از موتور میگذرد کنترل میشود. با تغییر جهت جریان (معکوس کردن ولتاژ در طول ترمینال ها)، جهت چرخش موتور نیز تغییر خواهد کرد.
انتخاب درایو موتور مناسب
در انتخاب این نوع از درایوهای موتور جریان مستقیم، نکات مهمی وجود دارد که حتما باید به آن ها توجه داشته باشید. در صورتی که قصد خرید مطمئن و بر اساس نیاز خود را دارید، باید به این نکات توجه داشته باشید. مهم ترین موضوع در انتخاب این درایوها، جریان عبوری و ولتاژ است. بنابراین شما باید مشخصات موتور را با مشخصات راه انداز به صورت کامل تطبیق دهید. همچنین فرکانس عملی، ابعاد، ورودی تغذیه، توان نامی، قابلیت کنترل جهت و نوع فرامین کنترلی و سیگنال ها نیز از دیگر مواردی هستند که هنگام خرید یک درایو dc باید توجه ویژه ای به آن ها بر اساس نیاز خود و مشخصات موتور داشته باشید. توجه به این نکته ضروری است که هنگام انتخاب درایور موتور، نوع موتور را نیز باید در نظر گرفت. برای مثال یک موتور DC براش، ساده ترین نوع کنترل را دارد زیرا به زمان یا دستور العمل خاصی نیاز نیست ، در حالی که استپر موتور و سروو موتور، هر دو برای عملکرد صحیح به یک نوع خاص از سیگنال نیاز دارند.
عوامل مهم در انتخاب درایو DC
رنج ولتاژ درایور DC
اولین فاکتوری که باید به آن دقت شود این است که رنج ولتاژی که درایو DC میتواند در آن کار میکند چه بازه ای است، مثلا ممکن است یک درایو محدوده ولتاژ 12 تا 36 ولت را ساپورت بکند، در دیتاشیت و کتابچه راهنمای موتور DC این اعداد ذکر شده. البته هر درایو یک ولتاژ مناسب برای کار کردن دارد که خیلی از مواقع آن عدد روی درایو نوشته میشود.
جریان نامی و لحظه ای
علاوه بر رنج ولتاژ ، باید به حداکثر جریان نامی و لحظه ای هم توجه شود، مثلا ممکن است یک درایور دارای حداکثر جریان دائم کار (نامی) 30 آمپر باشد اما همان درایور میتواند تا 50 آمپر را نیز تحمل کند یعنی اگر موتور تا 50 آمپر هم به صورت لحظه ای (منظور از لحظه ای تا حدود 1 دقیقه است) داشته باشد، درایور میتواند این جریان را تحمل کرده و کنترل دور را انجام دهد.
نحوه کنترل دور موتور DC
فاکتور بعدی که باید مورد توجه قرار گیرد این است که نحوه کنترل دور الکتروموتور DC به چه صورت است. نحوه کنترل به 3 صورت امکان پذیر است:
- به صورت کاملا دستی، مثلا کم و زیاد کردن سرعت از طریق یک دکمه ولوم از مینیمم تا ماکزیمم
- توسط ولتاژ آنالوگ که به درایور می آید
- از طریق پالس که یک plc یا میکروکنترلر میتواند منبع آن باشد
میتوان فرمان کنترل سرعت را به درایور منتقل کرد.
قابلیت soft starter
فاکتور بعدی این است که ممکن است بخواهیم از درایورهای دیسی به روش soft starter استفاده کنیم. در این روش وقتی درایور در جریان ماکزیمم قرار میگیرد، سرعت موتور را به صورت یک شیب یکنواخت افزایش میدهد و سرعت به صورت آنی بالا نمیرود. این کار باعث میشود که هم تجهیزات الکتریکال و هم تجهیزات مکانیکال عمر و دوام بیشتری داشته باشند.
معمولا روی درایورهای دیسی دیپ سوئیچ هایی وجود دارد و معمولا برای تنظیمات داخل درایور مورد استفاده قرار میگیرند. برای اطلاع از نحوه تنظیم روی این درایورها به چه صورت است باید حتما به دیتا شیت و کاتالوگ درایور مراجعه شود.
لینک اکسترنال
ممکن است درایوری در بازار دیده شود که علاوه بر کلیدهای دستی برای اعمال تغییرات، لینک های خارجی هم داشته باشد. کاربرد این لینک های خارجی به این صورت است که اگر شما یک پتانسیومتر خارجی داشته باشید و بخواهید درایور را داخل تابلو نصب بکنید و پتانسیومتر خارجی را بر روی در تابلو نصب کنید.
قابلیت sensorless control
بعضی از درایورها قابلیت حرفه ای sensorless control را نیز دارند. اما این به چه معنا است؟
همانظور که میدانید وقتی موتور روشن شود، کار خود را با یک جریان اولیه شروع میکند و هرچه گشتاور بیشتر شود، جریان هم بیشتر میشود. به عنوان یک قاعده کلی، گشتاور اعمال شده توسط موتور با جریانی که میکشد رابطه مستقیم دارد، حال اگر ما درایوری داشته باشیم که بر اساس جریانی که موتور میکشد کنترل گشتاور را انجام دهد، در این صورت افت گشتاور نخواهیم داشت به عبارت دیگر وقتی که سرعت موتور پایین بیاید، گشتاور کافی برای حرکت موتور وجود خواهد داشت. مشکل بزرگی که در درایو کردن موتورهای دیسی وجود دارد همین نکته است که اگر سرعت موتور از یک حدی کمتر شود، افت گشتاور زیاد شده و موتور نمیتواند بار را بچرخاند اما با وجود درایورهای حرفه ای مثل درایور pmd90 که قابلیت سنسور کنترل دارند شما میتوانید این افت را تا حد قابل ملاحظه ای جبران کنید و در سرعت های پایین هم گشتاور مناسب داشته باشید.
نوع دیوایس کنترلی
نکته دیگری که باید مورد توجه قرار گیرد این است که حتما باید دیوایس کنترلی مشخص شود. دیوایس کنترلی یکی از این 3 حالت است: دستی، ولتاژ آنالوگ، پالس pwm. این به این معنی است که منبع فرمان کنترل سرعت کجا است. این فرمان یا از دست اپراتور می آید، یا از یک ولتاژ آنالوگ که معمولا بین صفر تا 10 ولت است می آید و یا از یک پالس با فرکانس مشخص مثلا 10kHz می آید. درایوری که قصد خرید آن را دارید حتما باید متناسب با فرمان کنترلی شما باشد یعنی اگر شما یک موتور دیسی دارید که با یک plc که با ولتاژ آنالوگ کار میکند قصد دارید، درایوری که میخردی حتما باید توانایی پشتیبانی از ولتاژ آنالوگ را داشته باشد.

چپ گرد و راست گرد موتور DC
نکته دیگری که باید به آن توجه داشت این است که آیا درایور دیسی که شما قصد خریداری آن را دارید، به صورت تک جهت است یا خیر؟ یعنی تنها یک جهت چپ گرد یا راست گرد را پشتیبانی میکند یا اینکه هر دو جهت را میتوانید آن را داشته باشید. بعضی از درایورهای دیسی این توانایی کنترل سرعت موتور در دو جهت را ندارند. در این نوع درایورها باید موتور را در یک جهت بست و فقط هم در همان جهت امکان کنترل سرعت وجود دارد اما در برخی درایورها مانند درایور pmd60A یا درایور AMD10 امکان اینکه کنترل جهت حرکت هم انجام شود، وجود دارد.
نحوه نصب در جعبه
شما باید به این نکته هم توجه داشته باشید که نحوه نصب درایور به چه صورت است و قرار است به چه شکل روی تابلو قرار گیرد.
خواندن انکودر
بعضی از درایورهای دیسی وجود دارند که میتوانند انکودر را هم بخوانند که شما فیدبک موتوری که انکودر دارد را به آن بدهید و کنترل سرعت به صورت close loop یا حلقه بسته را خواهید داشت. معمولا در درایورهایی که حلقه بسته هستند شما امکان کنترل موقعیت یا همان کنترل زاویه را هم دارید.
اشتباهات رایج در مورد استفاده از موتور DC و درایو موتور DC
وقتی قرار است جهت حرکت معکوس شود، تا جای ممکن سرعت به صفر برسد و آرام آرام برگردد در غیر این صورت جریان برگشتی میتواند به درایور آسیب برساند. در سرعت های بالا که موتور اینرسی دارد بلافاصله جهت حرکت برنگردد، یا بار از روی موتور برداشته شود و یا سرعت موتور آرام آرام کم شود و سرعت دوباره به تدریج در جهت مخالف زیاد شود.
این اشتباه را نکیند که اگر مثلا روی درایور فقط عدد 24 ولت نوشته شده شما هم باید 24 ولت تغذیه به آن بدهید. بعضی از درایورها ولتاژ را به صورت یک بازه عددی ذکر میکنند اما بعضی از درایورها یک عدد نوشته اند که ممکن است چنین اشتباهی را مرتکب شد.در نظر داشته باشید که درایور دیسی همیشه دور موتور را کاهش میدهد و شما همیشه با درایور DC کاهش دور خواهید داشت یعنی اگر موتور با سرعت نامی خود که عددی بزرگ است کار میکند، درایور دور موتور را از آن عدد ماکزیمم پایین تر می آورد مثلا اگر دور نامی یک موتور 100RPM است شما با درایور بین 30 تا 100 rpm را خواهید داشت.
اشتباه دیگری که وجود دارد و ممکن است افرادی آن را مرتکب شوند این است که کاهش دور لزوما با افزایش گشتاور همراه نیست. این اشتباهی است که خیلی ها مرتکب میشوند و تصور میکنند هر قطعه ای که کاهش دور انجام میدهد لزوما افزایش گشتاور را انجام میدهد. این را شما فقط در مکانیزم های مکانیکی مثل گیربکس ها یا دنده ها دارید و در درایورها نه تنها افزایش گشتاور ندارید بلکه کاهش گشتاور دارید مگر اینکه از سیستم های sensorless contro استفاده کنید.
تغذیه درایو DC
تغذیه ای که به درایور متصل میشود باید همان تغذیه ولتاژ نامی موتور باشد. به عنوان مثال درایوی را تصور کنید که از 12 تا 48 ولت را میپذیرد، بسته به اینکه شما چه موتوری را به درایو وصل میکنید، مبنای ولتاژ تغذیه درایو باید همان ولتاژ موتور باشد. مثلا اگر یک موتور 24 ولت به درایو وصل میکنید، تغذیه درایور نیز باید 24 ولت باشد و اگر موتور 12 ولت به درایو وصل میکنید، تغذیه ای هم که به درایو وصل میکنید باید 12 ولت باشد.
تغذیه موتور DC ترمزدار
در مورد تغذیه موتور ترمز دار DC توجه به این نکته مهم است که فرض کنید شما یک موتور ترمزدار 24 ولت دارید و هم تغذیه موتور و هم تغذیه ترمز هر دو با این ولتاژ انجام میشود. در هنگام نصب باید توجه داشته باشید که ترمز را مستقیما به برق 24 ولت وصل کنید و تغذیه موتور را از داخل درایور بدهید. علت این کار این است که ممکن است ترمز شما با تغذیه ای که برای موتور می آید فعال نشود یعنی در هنگامی که سطح فرکانس ولتاژ پایین می آید و مثلا روی 12 ولت قرار میگیرد، ترمز عمل نمیکند و شفت موتور را رها نمیکند و به موتور فشار می آید و به صورت ایست باقی میماند بنابراین شما باید تغذیه موتور را از روی درایور بدهید اما تغذیه ترمز را به صورت مستقیم از منبع تغذیه.
سیم بندی موتور و درایو موتور DC
در مورد سیم بندی موتور به درایور، در تغذیه مثبت و نفی وجود دارد اما بر روی ارتباط موتور با درایور مثبت و منفی موجود ندارد و این امری طبیعی است به علت اینکه در حقیقت درایور یک ولتاژ خروجی به ما میدهد که اگر با پلاریته مثبت بدهیم موتور در جهت مثبت حرکت میکند که این مثبت میتواند چپ گرد و یا راست گرد باشد و اگر پلاریته موتور را معکوس بزنیم جهت گردش موتور تغییر میکند و این به سیم بندی که به درایور می آید خیلی مرتبط نیست و به نیاز ما برای گردش موتور وابسته است اما در نظر داشته باشید که هرگز وقتی که درایور به برق وصل است و در حال تغذیه موتور است، عمل باز کردن سیم و جابجا کردن آن را انجام ندهید و قبل از آن حتما درایور خاموش شده باشد و برق کاملا قطع شده باشد، بعد از آن موتور را از درایور آزاد کنید و سپس در جهت معکوس نصب کنید.
اشتباه دیگری که وجود دارد و معمولا انجام میشود این است که وقتی موتور به دایور متصل است و دستگاه خاموش است شفت موتور توسط قطعه یا مکانیزمی که به آن متصل است حرکت داده میشود. این را در نظر داشته باشید که حرکت دادن مکانیزمی که موتور یا شفت موتور به آن متصل است باعث میشود که یک جریان برگشتی به درایور داده شود و منجر به آسیب رسیدن به درایور میشود. حتما در نظر داشته باشید که اگر در دستگاه حرکت به صورت دستی هم وجود دارد (به این معنی که اگر موتور دارد حرکت میکند نیازی هست در زمان خاموشی همان مکانیزمی که با موتور حرکت میکند با دست هم حرکت داده بشود) حتما مکانیزم یا سوئیچی تعبیه بشود که اتصال برق بین موتور و درایور را قطع بکند که به درایور آسیبی نرسد.
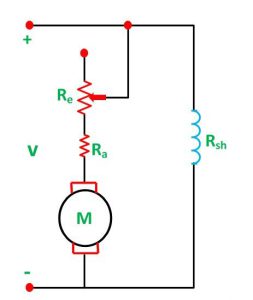
2. کنترل دور موتور DC شنت با مقاومت آرمیچر
مدار کنترل دور موتور DC شنت از طریق کنترل مقاومت آرمیچر در شکل زیر نشان داده شده است. در این روش یک مقاومت متغیر Re در مدار آرمیچر قرار می گیرد. تغییر در مقاومت متغیر بر شار تأثیر نمی گذارد زیرا میدان به طور مستقیم به تغذیه اصلی متصل است.
نمودار مشخصه سرعت – جریان موتور شنت DC در این حالت، در شکل زیر نمایش داده شده است.
3. کنترل دور موتور DC سری با مقاومت آرمیچر
حال مدار کنترل سرعت موتور DC سری را با استفاده از روش کنترل مقاومت آرمیچر در نظر می گیریم.
با تغییر مقاومت مدار آرمیچر، جریان و شار هر دو تحت تأثیر قرار می گیرند.
افت ولتاژ در مقاومت متغیر باعث کاهش ولتاژ آرمیچر می شود و در نتیجه سرعت موتور کاهش می یابد.
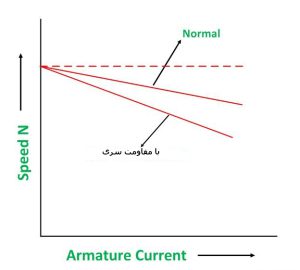
نمودار مشخصه سرعت – جریان موتور DC سری در این حالت در شکل زیر نمایش داده شده است.
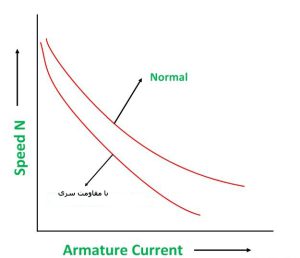
هنگامی که مقدار مقاومت متغیر Re افزایش یابد، موتور با سرعت کمتری کار می کند.
معایب کنترل دور موتور DC به روش کنترل مقاومت آرمیچر
مقدار زیادی از توان در مقاومت خارجی Re اتلاف می شود.
کنترل مقاومت آرمیچر، به گونه ای محدود می شود که سرعت را از سرعت معمول موتور پایین تر نگه داشته و افزایش سرعت بالاتر از حد نرمال از این طریق امکان پذیر نیست.
برای مقدار معین مقاومت متغیر، کاهش سرعت ثابت نیست بلکه با بار موتور تغییر می کند.
این روش کنترل سرعت موتور تنها برای موتورهای کوچک استفاده می شود.
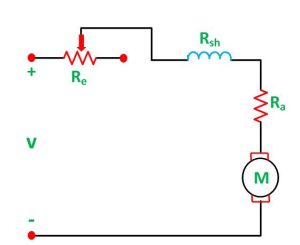
4.کنترل دور موتور DC به وسیله کنترل شار میدان
شار از طریق جریان میدان تولید می شود. بنابراین کنترل سرعت موتور (کنترل دور موتور DC) از طریق کنترل جریان میدان قابل دستیابی است.
در موتور DC شنت مقاومت متغیر Rc به صورت سری به سیم پیچ های میدان مطابق شکل متصل می شود.
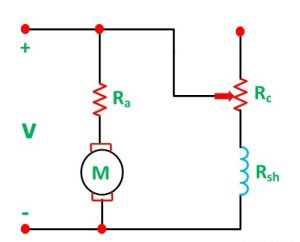
جریان شنت در این حالت از رابطه زیر به دست می آید:
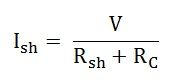
اتصال مقاومت Rc باعث کاهش جریان میدان می شود و از این رو شار نیز کاهش می یابد. این کاهش شار، سرعت را افزایش می دهد و بدین ترتیب موتور با سرعتی بالاتر از سرعت نرمال کار می کند. بنابراین از این روش برای سرعت دادن به موتور به میزان بالاتر از نرمال و یا اصلاح افت سرعت به دلیل بار استفاده می شود.
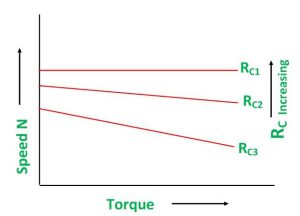
نمودار مشخصه سرعت – گشتاور برای موتور DC شنت در شکل زیر نمایش داده شده است:
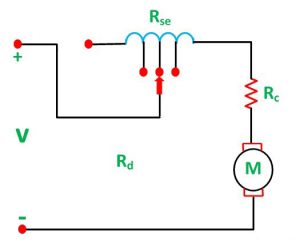
5. کنترل دور موتور DC سری از طریق کنترل شار میدان
در موتور DC سری تغییر در جریان میدان با روش های مختلف مانند استفاده از دایورتر و یا روش کنترل میدان ضربه ای (Tapped field control) صورت می گیرد.
- کنترل موتور DC سری با استفاده از دایورتر
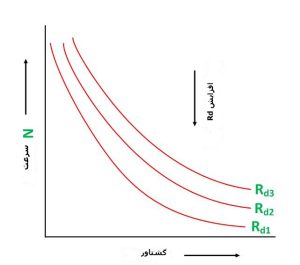
یک مقاومت متغیر Rd به موازات سیم پیچ های سری مطابق شکل قرار می گیرد.
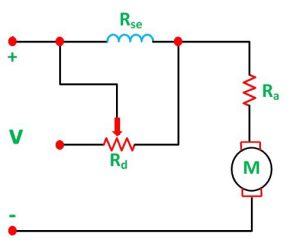
به این مقاومت موازی Diverter گفته می شود. بخشی از جریان اصلی از طریق مقاومت متغیر Rd منحرف می شود. بنابراین عملکرد یک دایورتر کاهش جریان از طریق سیم پیچ میدان است. کاهش جریان میدان باعث کاهش مقدار شار و در نتیجه افزایش سرعت موتور می شود.
- روش کنترل میدان ضربه ای
جریان موتور با تغییر شار میدان تغییر می کند. نمودار مشخصه سرعت – گشتاور در این حالت در شکل زیر نمایش داده شده است.
مزایای کنترل دور موتور DC از طریق کنترل شار میدان
این روش آسان و راحت است. از آن جا که میدان شنت خیلی کوچک است. اتلاف توان نیز در میدان شنت معمولاً کوچک است. شار معمولاً نمی تواند فراتر از مقدار نرمال افزایش یابد، بنابراین کنترل سرعت به وسیله شار محدود به تضعیف میدان باعث افزایش سرعت می شود. این روش تنها در رنج محدودی اعمال می شود. زیرا اگر میدان خیلی زیاد تضعیف شود (کاهش یابد)، پایداری از بین می رود.
6. روش کنترل دور موتور DC به وسیله PWM
ساده ترین راه برای کنترل سرعت موتور DC استفاده از مقاومت متغیر یا رئوستا است. اما یکی از پرکاربردترین روش ها بر کنترل دور موتور DC، استفاده از مدولاسیون عرض پالس است. در این روش که به اختصار PWM نیز نامیده می شود، یک روش مؤثر در کنترل توان است که در آن مقدار توان اعمالی به بار به دوره کاری سیکل وظیفه یا Duty cycle بستگی دارد.در روش کنترل موتور به وسیلۀ PWM، یک فرکانس مناسب و ثابت را انتخاب کرده و در صورتی که نیاز به افزایش سرعت موتور باشد، دوره کاری یا همان Duty cycle را افزایش و در صورتی که نیاز به کاهش سرعت موتور باشد دوره کاری را کاهش می دهیم. گفتنی است دوره کاری یا سیکل وظیفه در موتورهای الکتریکی معمولا کمتر از ۱۰۰% است.